Certifying Trajectories in Seconds
Formally verifying the safety of complicated trajectories at scale.

MIT
Drake Robotics Toolbox
Robotics and AI Institute
Uber Advanced Technology Group
MIT
University of Pennsylvania
University of Pennsylvania
Formally verifying the safety of complicated trajectories at scale.
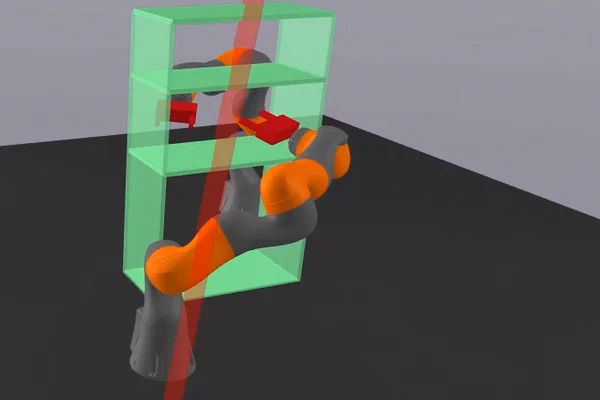
Provable correct descriptions of Configuration Space for collision-free motion planning
How do various structure effect the efficiency of solving optimization problems and structure the solution?

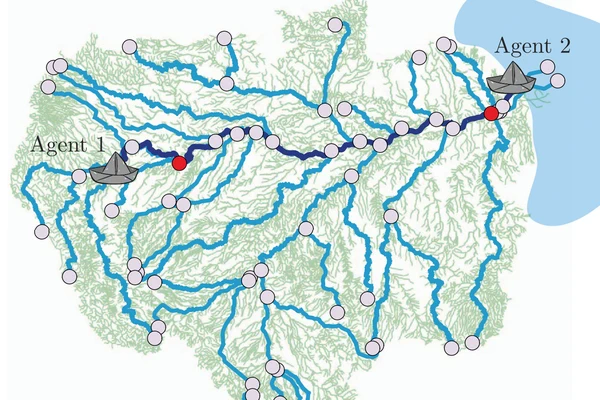
Resiliency of control systems and learning algorithms via counter-factual optimization
Guaranteed performance of heuristic strategies for a known, hard problem.