Strong Convex Relaxations and Tailored Conic Solvers with Applications in Robotics
My MIT EECS dissertation on strong convex relaxations, tailored conic solvers, and scalable optimization methods for robotics.

I recently earned my PhD in Electrical Engineering and Computer Science from MIT (May 2026) working with Pablo Parrilo and Russ Tedrake at the intersection of mathematical optimization, robotics, and reliable autonomy. I am on the job market! I am looking for research positions in optimization, robotics, and AI.
My research develops scalable algorithms for high-performance decision-making, particularly in robotics. I am interested in the entire decision-making pipeline, from high-level modeling, high-performance solver implementations, and low-level linear algebra to enable faster optimal decisions. I specialize in semidefinite programming and sums-of-squares optimization and development of convex optimization solvers. A central theme in my work is turning mathematical structure into computation. I build algorithms that exploit polynomial, conic, and graph structure to make difficult problems tractable, and am committed to distributing robust, open-source implementations of my methods.
I wrote CCosmo, a C++ first-order conic solver family, and VEGA, a decomposition solver for Graphs of Convex Sets. I am also an active contributor to Drake’s optimization, geometry, and planning stack. I am interested in industrial research roles where rigorous optimization, scalable algorithms, and high-quality software can push the frontier of AI, robotics, autonomy, and scientific computing.
MIT
Drake Robotics Toolbox
Robotics and AI Institute
Uber Advanced Technology Group
MIT
University of Pennsylvania
University of Pennsylvania
My MIT EECS dissertation on strong convex relaxations, tailored conic solvers, and scalable optimization methods for robotics.
A C++ and CUDA solver family for the structured convex programs that appear in robotics, control, and graph-of-convex-sets relaxations.
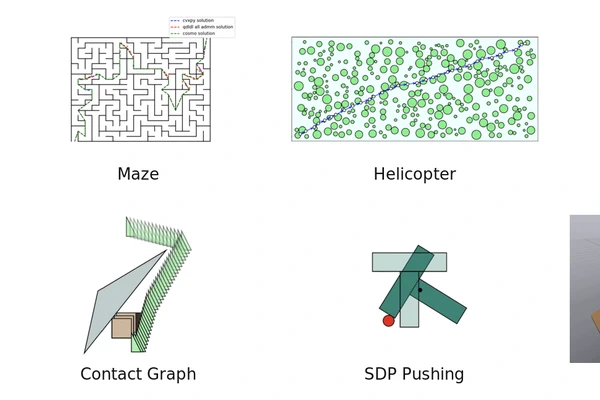
Parallel decomposition methods and benchmark infrastructure for large graph-of-convex-sets planning relaxations.
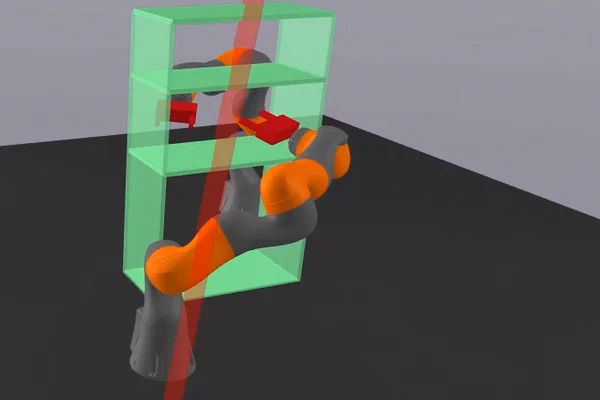
Formally verifying the safety of complicated trajectories at scale.
Provably correct descriptions of Configuration Space for collision-free motion planning
Solving linear systems of equations is a fundamental subroutine in many algorithms. What structures are amenable to solving linear equations even faster.