Mixed discrete and continuous planning using shortest walks in graphs of convex sets
savva-morozov
Sums-of-squares (SOS) optimization is a promising tool to synthesize certifiable controllers for nonlinear dynamical systems. Building upon prior works, we demonstrate that SOS can …
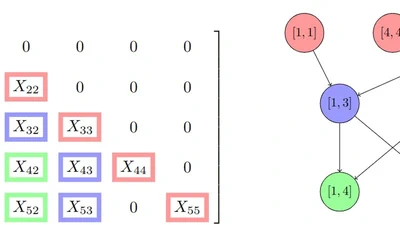
We study a general class of least-squares problems structured according to a partially ordered set (poset). This is a fundamental optimization problem underlying the design of …
The notion of approximate information states (AIS) was introduced in (Subramanian 2020) as a methodology for learning task-relevant state representations for control in partially …
Control scheduling refers to the problem of assigning agents or actuators to act upon a dynamical system at specific times so as to minimize a quadratic control cost, such as the …
— In optimal control problems, disturbances are typically dealt with using robust solutions, such as H∞ or tube model predictive control, that plan control actions feasible for the …