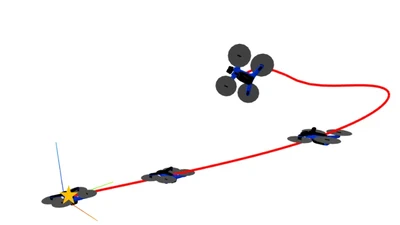
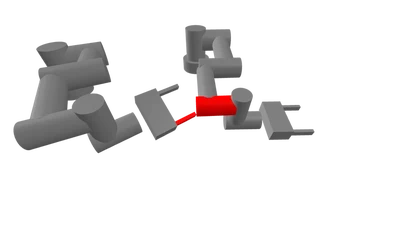
Mixed discrete and continuous planning using shortest walks in graphs of convex sets
savva-morozov
Sums-of-squares (SOS) optimization is a promising tool to synthesize certifiable controllers for nonlinear dynamical systems. Building upon prior works, we demonstrate that SOS can …
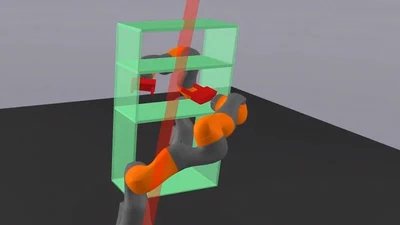
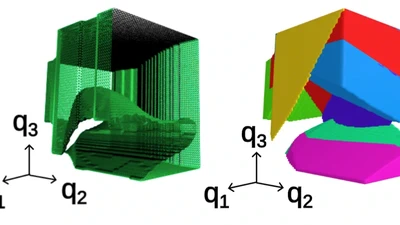
Understanding the geometry of collision-free configuration space (C-free) in the presence of task-space obstacles is an essential ingredient for collision-free motion planning. …
Configuration space (C-space) has played a central role in collision-free motion planning, particularly for robot manipulators. While it is possible to check for collisions at a …
The notion of approximate information states (AIS) was introduced in (Subramanian 2020) as a methodology for learning task-relevant state representations for control in partially …