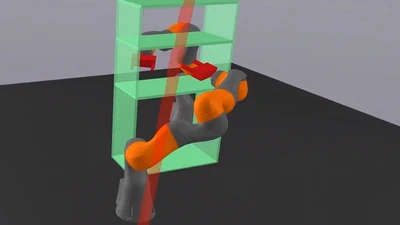
Certifying Trajectories in Seconds
Formally verifying the safety of complicated trajectories at scale.
•
2 min read
Formally verifying the safety of complicated trajectories at scale.
Provable correct descriptions of Configuration Space for collision-free motion planning
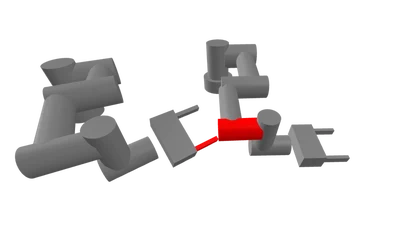
How do various structure effect the efficiency of solving optimization problems and structure the solution?

Resiliency of control systems and learning algorithms via counter-factual optimization
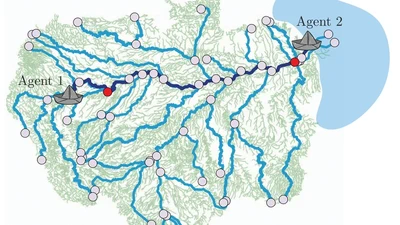
Guaranteed performance of heuristic strategies for a known, hard problem.