Strong Convex Relaxations and Tailored Conic Solvers with Applications in Robotics
My MIT EECS dissertation on strong convex relaxations, tailored conic solvers, and scalable optimization methods for robotics.
•
1 min read
My MIT EECS dissertation on strong convex relaxations, tailored conic solvers, and scalable optimization methods for robotics.
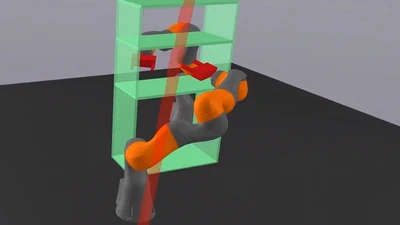
Formally verifying the safety of complicated trajectories at scale.
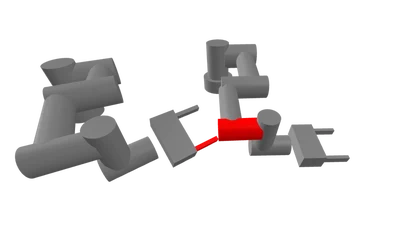
Provably correct descriptions of Configuration Space for collision-free motion planning