Strong Convex Relaxations and Tailored Conic Solvers with Applications in Robotics
My MIT EECS dissertation on strong convex relaxations, tailored conic solvers, and scalable optimization methods for robotics.
•
1 min read
My MIT EECS dissertation on strong convex relaxations, tailored conic solvers, and scalable optimization methods for robotics.
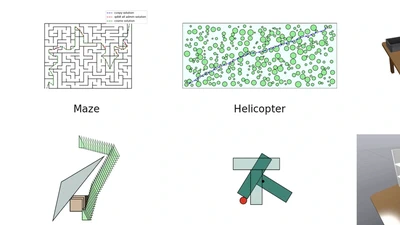
Parallel decomposition methods and benchmark infrastructure for large graph-of-convex-sets planning relaxations.
A C++ and CUDA solver family for the structured convex programs that appear in robotics, control, and graph-of-convex-sets relaxations.